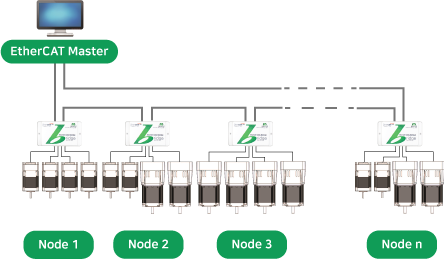
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.
EtherCAT
EtherCAT Master 는 1msec의 통신 주파수로 위치 명령을 전송하고,
EtherCAT Slave로 부터 피드백을 받습니다. 다른 기능을 사용하여
추가 모션 및 데이터 설정에 엑세스할 수 있습니다.